車聯(lián)網(wǎng)中基于英特爾? 架構的激光雷達 3D 點云處理與感知融合方案
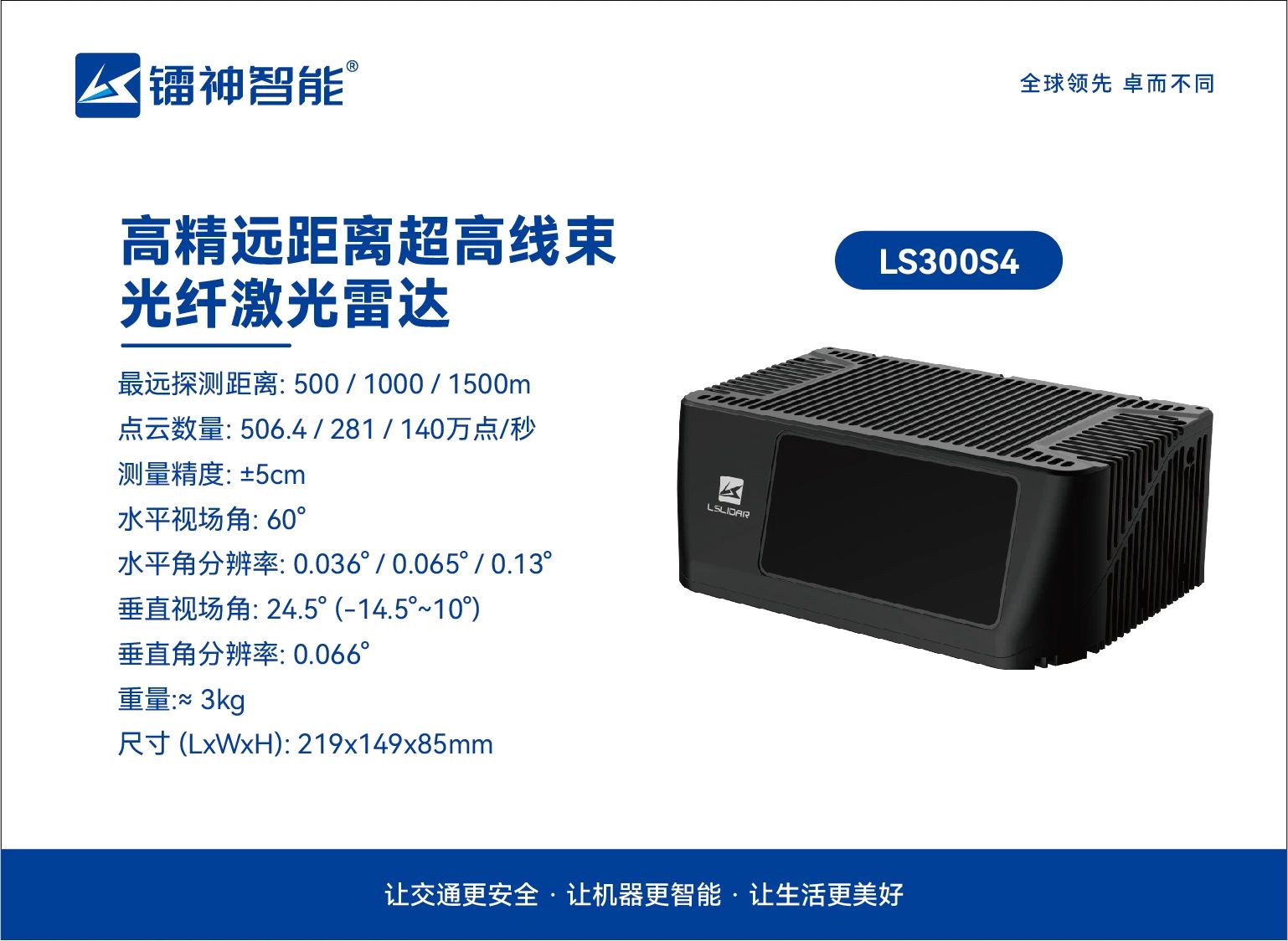
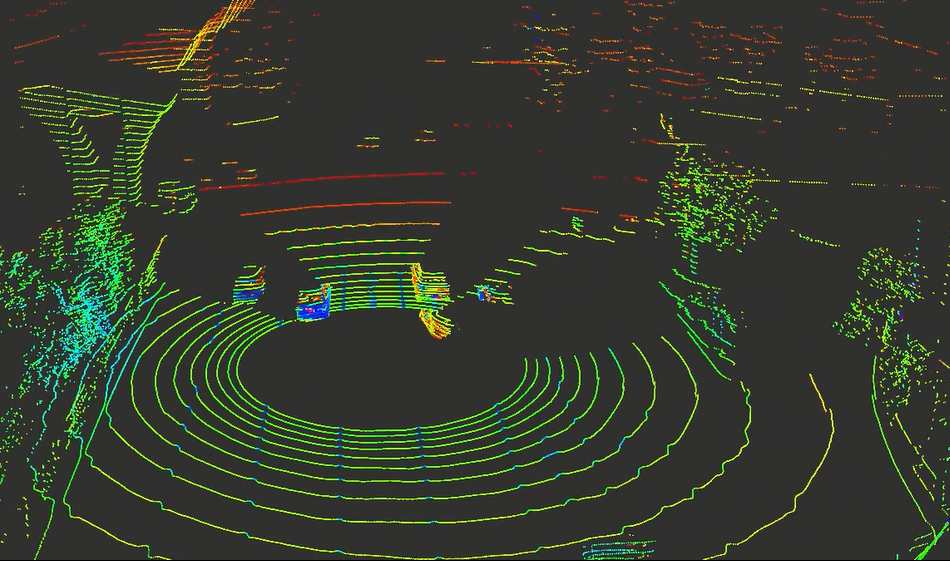
在基于車聯(lián)網(wǎng)(C-V2X)的車路協(xié)同應用中�����,路側感知設備獲取的交通目標與交通環(huán)境信息由路側邊緣計算設備進行分析處理���,生成各類 I2V(Infrastructure-to-Vehicle)消息���,并由路側單元(RSU)通過無線鏈路發(fā)送給各類道路交通參與者(包括聯(lián)網(wǎng)車輛和弱勢交通參與者),用于提升交通安全與交通效率����。作為路側感知設備的激光雷達�,由于其 3D 成像和精確測距等卓越性能��,受到越來越廣泛的應用���?���;谟⑻貭? 架構的路側邊緣計算設備����,在處理激光雷達生成的 3D 點云中(無論是深度學習還是傳統(tǒng)計算機視覺),都顯示出了卓越的性能�。本文介紹了基于第 11 代英特爾? 酷睿? 處理器和英特爾?OpenVINO? 工具套件分發(fā)版的集和誠? 路側 MEC 設備,用于支持基于深度學習的 3D 點云處理和鐳神? 雷視一體機(激光雷達與攝像頭)的感知融合計算����。我們?yōu)檐嚶?lián)網(wǎng)產業(yè)界提供了高性價比的路側感知和路側邊緣計算解決方案。